Topic outline
-
Quando si studiano i sistemi di controllo o i circuiti complessi, gli schemi a blocchi rappresentano uno strumento fondamentale per descrivere come i segnali si trasformano e si combinano.
Ogni blocco rappresenta una funzione di trasferimento, cioè il modo in cui un sistema reagisce a un segnale d’ingresso producendo un’uscita.
L’algebra degli schemi a blocchi fornisce le regole matematiche e grafiche che permettono di:
- collegare più blocchi in serie, parallelo o retroazione;
- manipolare nodi di somma e punti di diramazione;
- semplificare uno schema complesso fino a ottenere un unico blocco equivalente.
Queste operazioni sono alla base dell’analisi e della progettazione dei sistemi di controllo, perché consentono di studiare il comportamento complessivo del sistema conoscendo solo le sue parti.
Con l’algebra dei blocchi possiamo quindi passare dal disegno al modello matematico, capire come le varie sezioni interagiscono e prevedere come il sistema risponderà a ogni variazione del segnale o del carico.
-
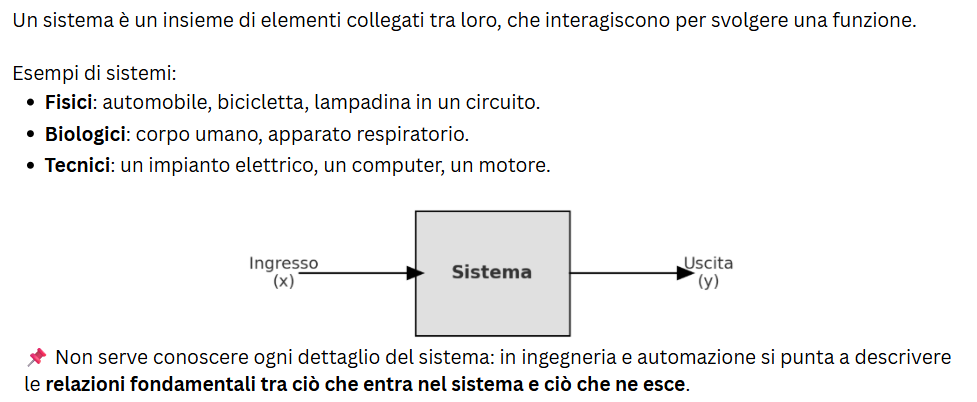
Quando parliamo di un sistema, intendiamo un insieme di elementi collegati tra loro, che interagiscono per svolgere una funzione ben precisa. Pensate a un’automobile: non è solo un motore, o solo le ruote, ma l’insieme di tante parti che collaborano. Oppure al corpo umano: cuore, polmoni, sistema nervoso… sono tanti sottosistemi che lavorano insieme. Lo stesso concetto si applica anche in tecnologia: un computer, un impianto elettrico, un motore.
Quello che ci interessa non è descrivere tutti i dettagli, ma capire il legame tra ciò che entra in un sistema, l’ingresso, e ciò che esce, l’uscita.
Transcaratteristica
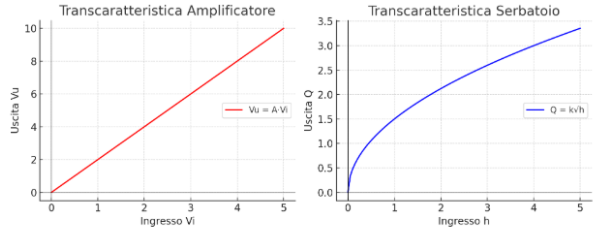
Il legame ingresso–uscita non si può solo scrivere con una formula: si può anche rappresentare graficamente. Disegnando l’ingresso sull’asse delle ascisse e l’uscita sull’asse delle ordinate, otteniamo una curva che si chiama transcaratteristica del sistema.
Nel caso dell’amplificatore lineare, la transcaratteristica è una retta: più aumenta l’ingresso, più cresce in proporzione l’uscita. In altri sistemi, invece, la curva può essere più complessa, non lineare, e può raccontare fenomeni come la saturazione o la limitazione.
-
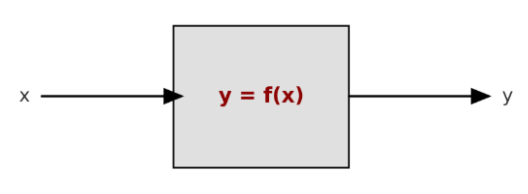
Il modello matematico ci permette di descrivere un sistema con formule, ma spesso è più comodo avere una rappresentazione grafica.
Lo schema a blocchi serve proprio a questo: rappresenta il legame tra ingresso e uscita in modo semplice e immediato. Ogni blocco non è altro che una funzione di trasferimento: cioè una regola che trasforma l’ingresso in uscita. In questo modo, sistemi complessi possono essere costruiti collegando più blocchi tra loro.
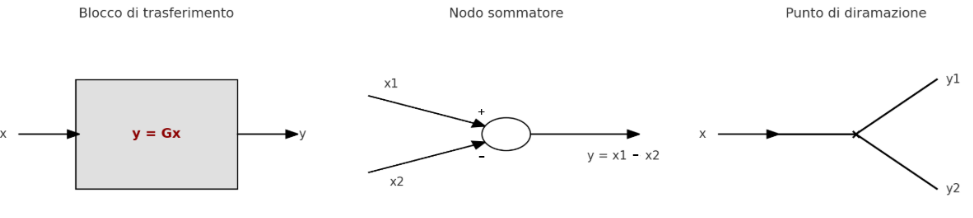
Gli schemi a blocchi usano tre elementi fondamentali.
- Il primo è il blocco di trasferimento, che riceve un ingresso e produce un’uscita secondo una certa legge, per esempio 𝑦 = 𝐺𝑥.
- Il secondo è il nodo sommatore, che permette di combinare più segnali: possiamo sommare due ingressi o anche fare la differenza tra loro.
- Infine abbiamo il punto di diramazione, che serve quando lo stesso segnale deve alimentare più blocchi contemporaneamente. Questi tre elementi sono la base di qualunque schema a blocchi.
Il grande vantaggio dello schema a blocchi è la sua immediatezza: ci permette di visualizzare il flusso dei segnali e di collegare tra loro sottosistemi diversi.
-
L’algebra degli schemi a blocchi ci dà le regole per combinare i blocchi in modo ordinato, riducendo schemi complessi a un unico blocco equivalente.
Le tre connessioni principali che vedremo sono: la serie, il parallelo e la retroazione.
Serie (o cascata)
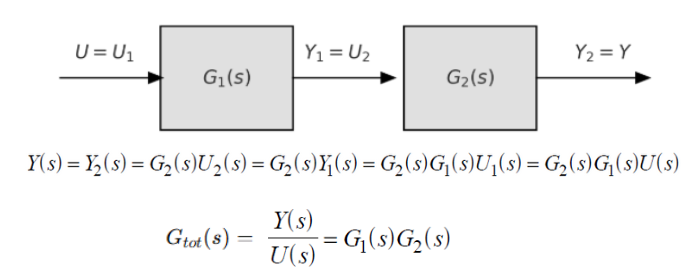
Iniziamo con la connessione più semplice: la cascata, o collegamento in serie.
In questo caso, l’uscita del primo blocco diventa l’ingresso del secondo, e così via. Se indichiamo con 𝐺1(𝑠) e 𝐺2(𝑠) i due blocchi, la funzione di trasferimento complessiva sarà data dal loro prodotto: 𝐺𝑡𝑜𝑡(𝑠)=𝐺1(𝑠)⋅𝐺2(𝑠)
Questo vale in generale anche per più blocchi in cascata: basta moltiplicare le funzioni di trasferimento di ciascun blocco.
È un collegamento molto comune, perché spesso i sistemi reali sono composti da più sottosistemi disposti in sequenza.
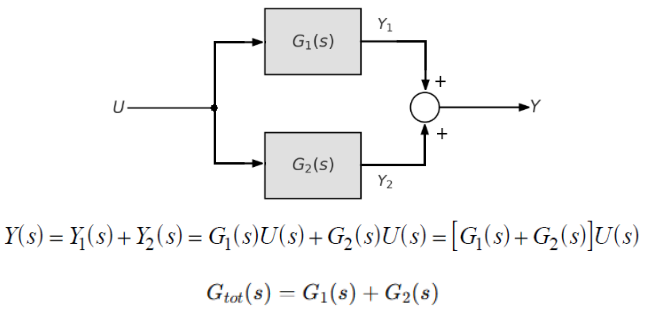
Parallelo
In questo caso, i blocchi ricevono tutti lo stesso ingresso, ma le loro uscite vengono poi combinate in un nodo sommatore.
Se i due blocchi sono 𝐺1(𝑠) e 𝐺2(𝑠), la funzione di trasferimento totale sarà la somma: 𝐺𝑡𝑜𝑡(𝑠)=𝐺1(𝑠)+𝐺2(𝑠)
Anche qui la regola è valida per un numero qualsiasi di blocchi: basta sommare tutti i contributi. Il parallelo è utile, ad esempio, quando vogliamo che un segnale passi contemporaneamente attraverso più percorsi che vengono poi ricombinati.
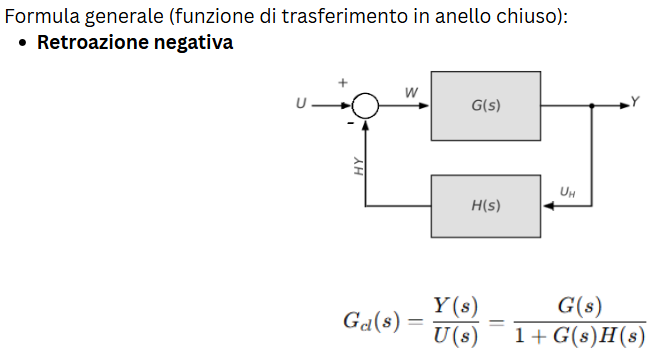
Sistemi in retroazione
Il collegamento più importante nei sistemi di controllo è però la retroazione. L’idea è semplice: una parte dell’uscita viene riportata all’ingresso e confrontata con il segnale di riferimento.
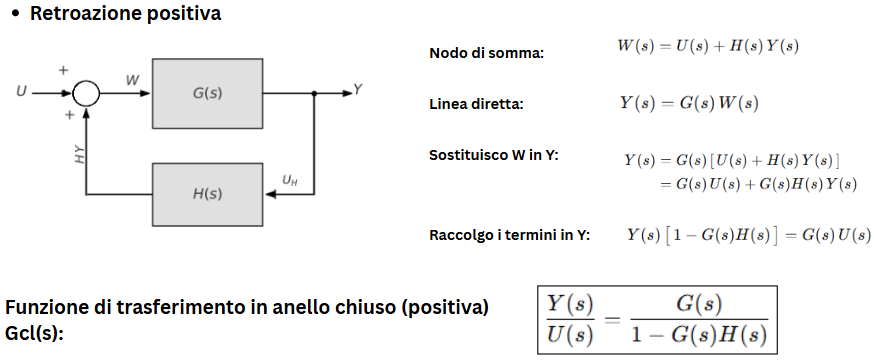
Se, invece, il ramo di ritorno entra col segno meno al nodo, parliamo di retroazione negativa: è quella che stabilizza, riduce l’errore e rende il sistema meno sensibile a parametri incerti.

-
Quando gli schemi a blocchi diventano complessi, con più nodi di somma e punti di diramazione, le semplici regole di serie, parallelo e retroazione non bastano più. In questi casi entrano in gioco le regole di manipolazione, che permettono di spostare nodi e diramazioni senza alterare il comportamento del sistema.
L’obiettivo è rendere lo schema più leggibile e più facile da ridurre, trasformandolo gradualmente in un blocco equivalente unico.
Le manipolazioni più comuni sono due:
- Spostamento del nodo di somma: è possibile portarlo prima o dopo un blocco, tenendo conto che i segnali in ingresso devono essere moltiplicati per la funzione di trasferimento del blocco stesso.
- Spostamento del punto di diramazione: anche in questo caso può essere spostato prima o dopo un blocco, modificando i segnali in modo coerente.
Queste regole derivano direttamente dalla linearità dei sistemi e permettono di applicare l’algebra dei blocchi anche a strutture molto articolate, come quelle presenti nei sistemi di controllo automatico o nei circuiti retroazionati.